
Avenger V6-2.7L (2008)
Control Unit: Description and Operation
Operation
OPERATION
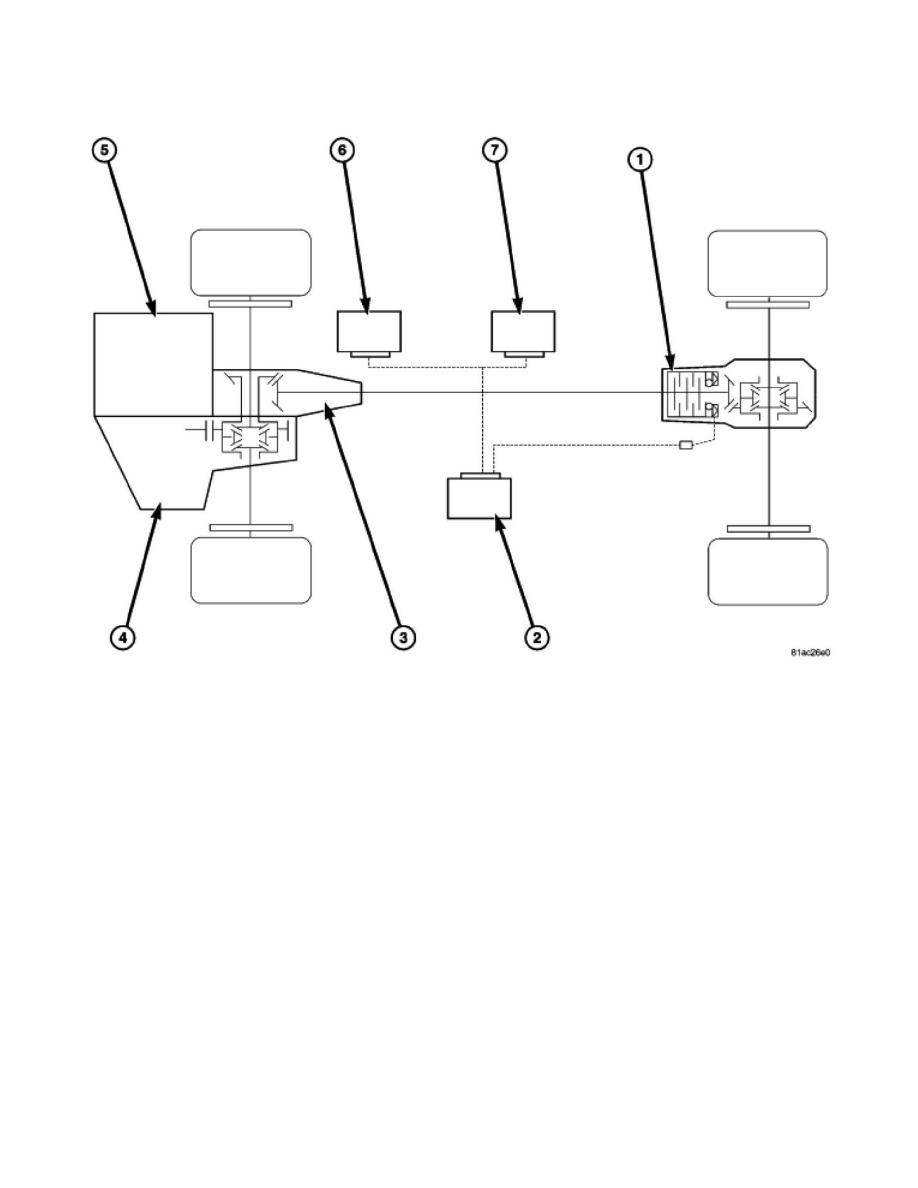
The all-wheel-drive system requires no driver input or control. Under most driving conditions, it is passive and power is transmitted to the front wheels
alone. The system functions to optimize traction and handling under the following conditions:
Anticipates slip by responding to pedal position unlike all-wheel drive systems that rely on pumps or viscous fluids to transfer torque, the system requires
no front-to-rear slippage for activation. This allows the system to transfer torque in response to accelerator pedal position. If the driver is asking for a lot
of power, the system immediately starts clamping the Electronically Controlled Coupling (ECC), transferring a high percentage of power to the rear
wheels. This avoids front wheel slippage, as power to propel the car is transmitted through all four tires. This mode of operation is called open-loop
operation in that there is no feedback to affect the torque transfer.
Modulates torque to optimize traction on slippery surfaces a second, closed loop, operating mode uses feedback from the wheel-speed sensors to
determine the appropriate torque transfer. When the front wheels slip, the all-wheel-drive electronic control module tells the ECC to start clamping,
sending power to the rear wheels. Attempting the same aggressive launch described above with the front wheels on ice and the rear wheels on dry
pavement, the ECC sends even more torque to the rear wheels to minimize slippage and launch the vehicle. Both modes are always active and the
maximum of the two is chosen. Power to the rear wheels is modulated during lost of traction while traveling at freeway speeds; for example,
hydroplaning on a puddle of water, will send very little power to the rear wheels because the controller knows at those speeds a lot of power is not
needed at the rear wheels.
Prevents binding during low-speed turns a third condition, which is independent of the others, uses the ESP steering angle sensor to determine when the
vehicle is turning in a tight circle. This condition causes the electronic control module to reduce torque to the rear wheels to prevent binding in the
driveline. The electronic control module is always checking for this condition as well.
Influences handling at moderate speeds. The AWD system is used to influence vehicle dynamics. Other manufacturers limit AWD to aiding traction or
providing off-road capability. They concentrate on launching the vehicle or going off road at speeds up to about 25 mph (40 km/hr). Above that speed
range, they use it to limit wheel slip for traction. On Avenger, additional ECM calibration controls torque to the rear wheels for improved handling in the
25-65 mph (40-105 km/hr) range. In this speed range, the system utilizes torque to the rear wheels during cornering with the throttle open to make the car
turn more easily - make the handling more neutral. This is more readily accomplished with an electronically controlled system, as used on the Avenger,
than with viscous-coupling or gerotor systems that require some degree of front-to-rear slip to transfer torque to the rear wheels. Above 53 mph (113