
Mountaineer 2WD V6-4.0L VIN K (2007)
PRINCIPLES OF OPERATION
Vehicle communication utilizes both medium and high speed controller area network (CAN) communications. CAN is a method for transferring data
among distributed electronic modules via a serial data bus.
The vehicle is equipped with 2 module communication networks:
-
Medium speed (MS) CAN
-
High speed (HS) CAN
MS-CAN
The MS-CAN is a medium speed communication network that uses an unshielded twisted pair cable of data (+) and data (-) circuits. The data (+) and
the data (-) circuits are each regulated to approximately 2.5 volts during neutral or rested network traffic. As bus messages are sent on the data (+)
circuit, voltage is increased by approximately 1.0 volt. Inversely, the data (-) circuit is reduced by approximately 1.0 volt when a bus message is
sent. Multiple bus messages can be sent over the network CAN circuits allowing multiple modules to communicate with each other. The MS-CAN
network will not communicate while certain faults are present, but will operate with diminished performance with other faults present. The MS-CAN
network may remain operational when 1 of the 2 termination resistors are not present.
The MS-CAN network operates at a maximum data transfer speed of 125 Kbps for bus messages and designed for general information transfer. The
network will remain operational, but at a degraded level, when certain circuit faults are present.
The following modules are on the MS-CAN network:
-
Audio unit
-
Instrument cluster
-
Smart junction box (SJB)
-
Parking aid module (if equipped)
-
Driver seat module (if equipped
-
Satellite radio receiver (if equipped)
-
Power running board module (if equipped)
-
Digital versatile disc (DVD) player (if equipped)
-
Electronic automatic temperature control (EATC) module (if equipped)
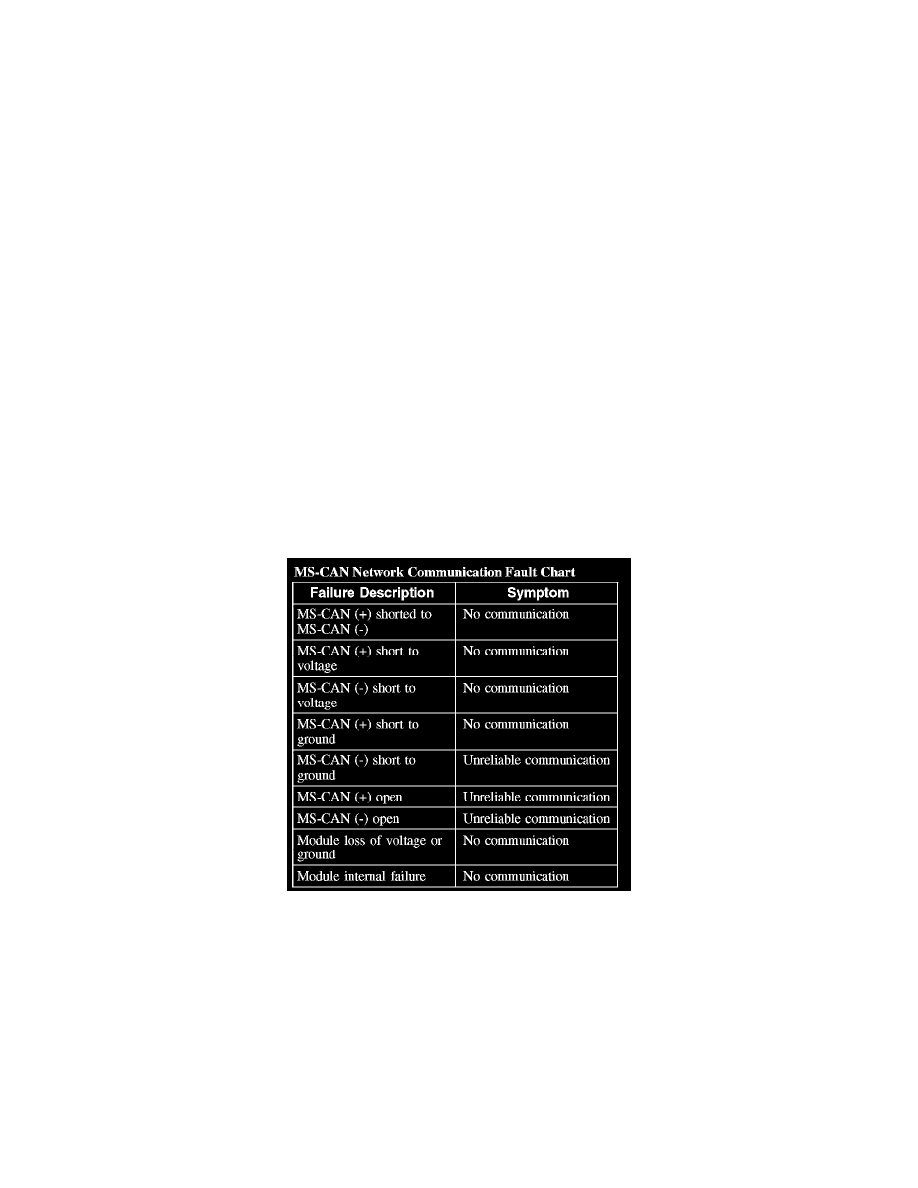
MS-CAN Network Communication Fault Chart
The fault chart describes the specific MS-CAN network failures and their resulting symptom:
HS-CAN
The HS-CAN is a high speed communication network that uses an unshielded twisted pair cable of data (+) and data (-) circuits. The data (+) and the
data (-) circuits are each regulated to approximately 2.5 volts during neutral or rested network traffic. As bus messages are sent on the data (+)
circuit, voltage is increased by approximately 1.0 volt. Inversely, the data (-) circuit is reduced by approximately 1.0 volt when a bus message is
sent. Multiple bus messages can be sent over the network CAN circuits allowing multiple modules to communicate with each other. The HS-CAN
network will not communicate while certain faults are present, but will operate with diminished performance with other faults present. The HS-CAN
bus may remain operational when 1 of the 2 termination resistors are not present. The HS-CAN network operates at a maximum data transfer speed of
500 Kbps and is designed for real time information transfer and control. The network will remain operational, but at a degraded level, when certain
circuit faults are present.