
XC60 FWD L6-3.2L VIN 96 B6324S2 (2010)
-
Which components/functions are standard /optional/accessories
-
Configuration/programming of the system.
The Controller Area Network (CAN)
The controller area network (CAN)
General
CAN (Controller Area Network) is a standardized system for multiplex-communication. Multiplex communication means that several control modules
can use the same cables for communication without traffic from one control module interfering with traffic from another.
Volvo has developed a new standard for multiplex communication - VOLCANO. VOLCANO is a development of CAN and uses real time operation and
prioritization. The description of prioritization is based on VOLCANO but is designated CAN.
The standard for Control area network (CAN) specifies:
-
That two cables should be used (CAN H and CAN L)
-
Which voltage levels should be used
-
What a message should look like
-
How transfer errors should be handled.
Cables, CAN H and CAN L
The CAN H and CAN L cables must not be confused with HS CAN and LS CAN which are speeds on the control area network. CAN H and CAN L are
a way of distributing signals within the multiplex communication network.
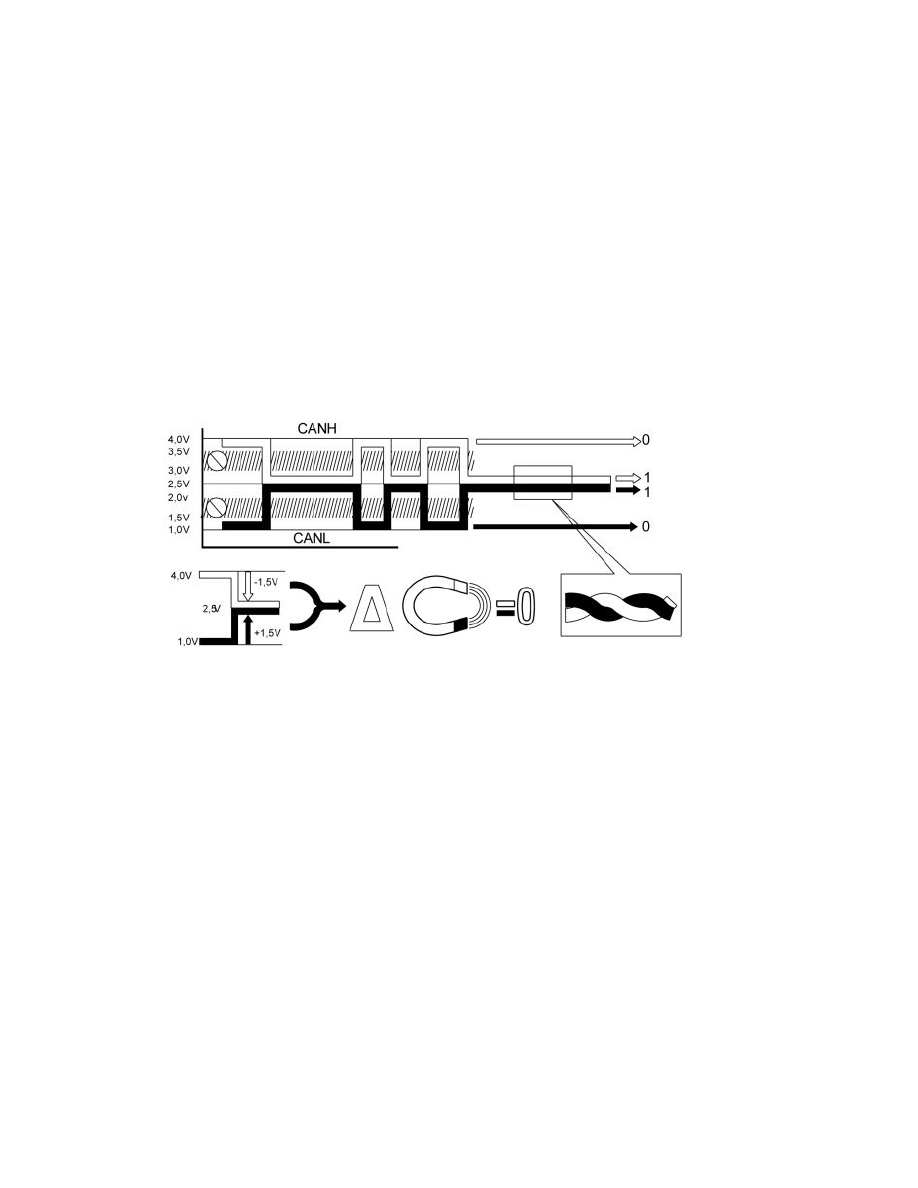
Communication occurs through two cables. These two cables are paired together.
The voltage levels for communication occur using differential voltage levels.
The reason for communicating using paired cables and differential voltage levels is that the network becomes less sensitive to interference.
The same message is transferred simultaneously by both cables, but different voltage levels are used.
-
Binary 1 = 2.5 V on both CAN H and CAN L.
-
Binary 0 = 4 V on CAN H and 1 V on CAN L.
When measured between CAN L and earth, the average voltage level is approx. 2.3 V.
When measured between CAN H and earth, the average voltage level is approx. 2.8 V.
These measurement values generally apply to "normal" traffic on the controller area network (CAN), i.e. if no fault has occurred that causes the control
modules in the network to start transmitting error messages.
Note! Certain control modules, such as the Supplemental restraint system module (SRS) and the Brake control module (BCM), also have CAN
communication for their own sensors. These networks are called internal controller area networks (CANs) and have nothing to do with
communication on the general controller area network (CAN). These controller area networks (CANs) are only used to transmit data between
the relevant sensor and the control module that the sensor is connected to.
Controller area network (CAN) message