
XC70 L5-2.5L Turbo VIN 59 B5254T2 (2003)
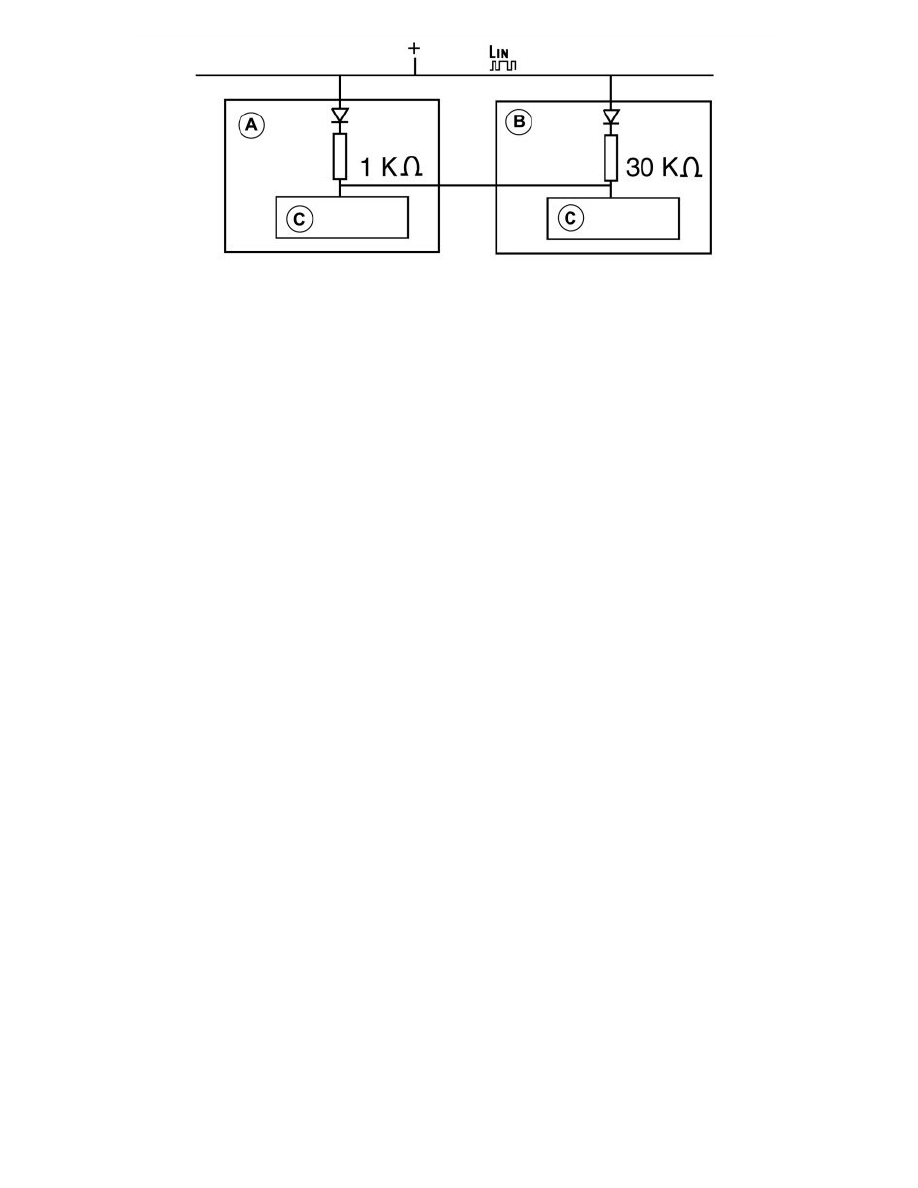
A = Master node
B = Slave node
C = Transmitter/receiver
LIN is terminated to the battery voltage on each node via a pull-up resistance
The master node is terminated with 1 kohms and the slave nodes with 30 kohms.
The termination resistance forms a parallel circuit and the resistance to the battery voltage depends on the number of connected nodes. The resistance to
ground should be infinite or at least extremely large if no communications are in progress.
LIN (Local Interconnect Network)
LIN (Local Interconnect Network)
General
LIN (Local Interconnect Network) is a standardised protocol for serial communication on a single wire between a master and several slave nodes.
The LIN protocol supports Multiplex communication, which means several nodes can communicate on the same wire without disturbing each other.
LIN was developed, by a consortium of automotive manufacturers, at the end of the 90s in order to build a network for data exchange over short
distances at a low cost. The development of the LIN standard is ongoing and Volvo plays an active part in this work.
LIN is adapted for one master and up to 16 slave nodes on each communication bus.
More nodes are possible, but several communication buses can in these instances be connected together via the master node. The master node can also
make up an interface to other types of communication buses, for example, CAN or MOST.
LIN is bidirectional, (two way half duplex) which means information can be sent in both directions. However only one control module at a time can send
information. The level on the bus wire is normally high (approx 13 V) via a pull-up resistance, but is taken down to a low level (approx 1 V) when one of
the nodes on the bus transmits.
The LIN protocol is a supplement to CAN. LIN is a less expensive alternative to CAN and is used where the transfer rate and performance is not as
critical.
Besides a reduction in the number of wires, LIN is adapted for more basic communications circuits, which means the internal clock circuit in a slave
node can be an inexpensive oscillating circuit (a.k.a. RC circuits) instead of crystals or ceramic oscillators that are used in systems with greater
sensitivity to time differences.
This means that control module costs for the LIN standard can be kept down.
A synchronisation procedure is used in each message on LIN in order to make communications, which are still time-dependent, possible. A number of
bits at the start of each message are used so that the clock circuit in each slave control module can adjust to the correct frequency so that the subsequent
data in the message can be received error-free.
If the LIN bus is inactive for a specific period of time, the slave nodes switch to sleep mode to reduce power consumption.
The transfer rate on LIN can lie between 5 and 20 kbit/s, but Volvo uses 9.6 kbit/s. This can be compared to the transfer rate on the CAN network which
is 125-500 kbit/s.
1 kbit/s = 1000 bits per second.
The reason why Volvo has selected a transfer rate of 9.6 kbit/s is the balance between performance and transfer quality. A higher transfer rate can be
used in some applications.
On a LIN bus there is always one control module that is the main control module (a.k.a. master node). All other control modules on the same LIN bus are
slave nodes.
The master node contains a list describing which slave nodes are connected on the LIN bus in question. The list in the master node also describes which
messages can be sent on the LIN bus and in which order.
Messages are sent in order according to the list in the master node with a specific time delay between messages, so that any responses from the slave
nodes can be received by the master node.
What the slave nodes shall do and/or which data is to be sent as a response when the slave node receives a message is in turn described in a list that is
programmed into each slave node. If a slave node has not managed to respond before it is time for the next message to be sent from the master node, the
master node will start to send nevertheless and the slave node will be interrupted during its transmission.
The maximum length of a bus wire is set to 35 m (114.83 ft). The high level on LIN means battery voltage, i.e. approx 9-18 V, yet all circuits connected