| t
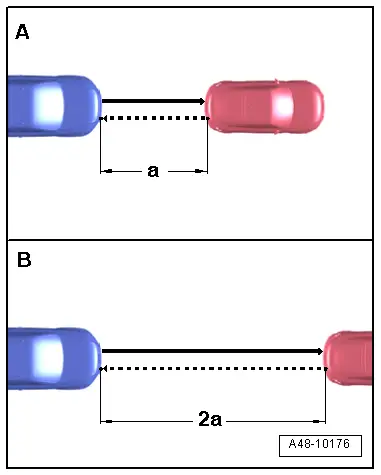
| In real traffic situations (e.g. on motorways and dual carriageways or when cornering), there are usually several vehicles within the radar's field of vision. |
| t
| In this case, it is necessary to detect which vehicle is in the same lane (and thus to decide which vehicle is to be used as the reference for maintaining the specified distance). |
| t
| The adaptive cruise control unit -J428- requires additional input signals for the lane recognition function: these are provided mainly by the yaw rate sender -G202-, the speed sensors -G44-, -G45-, -G46-, -G47- and the steering angle sender -G85-. By evaluating these signals, inferences can be drawn about the road's curvature. |
| t
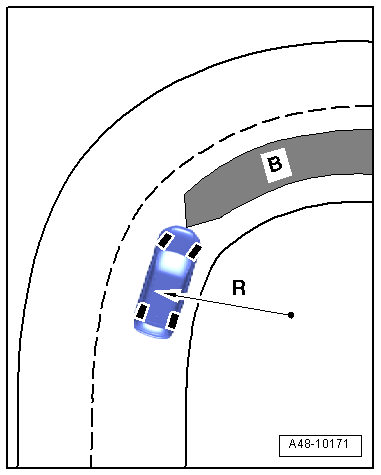
| The „imaginary“ lane „B“ is inferred from the current cornering radius „R“ and a specified average lane width. |
| t
| The nearest object measured by the radar sensor in this lane is used as the relevant object for distance control. |
| t
| In addition, the following components are used: control unit in dash panel insert -J285-, steering column electronics control unit -J527-, cruise control system switch -E45-, engine control unit -J623-, ABS control unit -J104-, rear right speed sensor -G44- (only on vehicles with four-wheel drive), front right speed sensor -G45-, rear right speed sensor -G46- (only on vehicles with four-wheel drive) and front left speed sensor -G47- |
|
|
|