
Freelander System Description and Operation
COMMUNICATION DATA BUSES
DESCRIPTION AND OPERATION
86-4-7
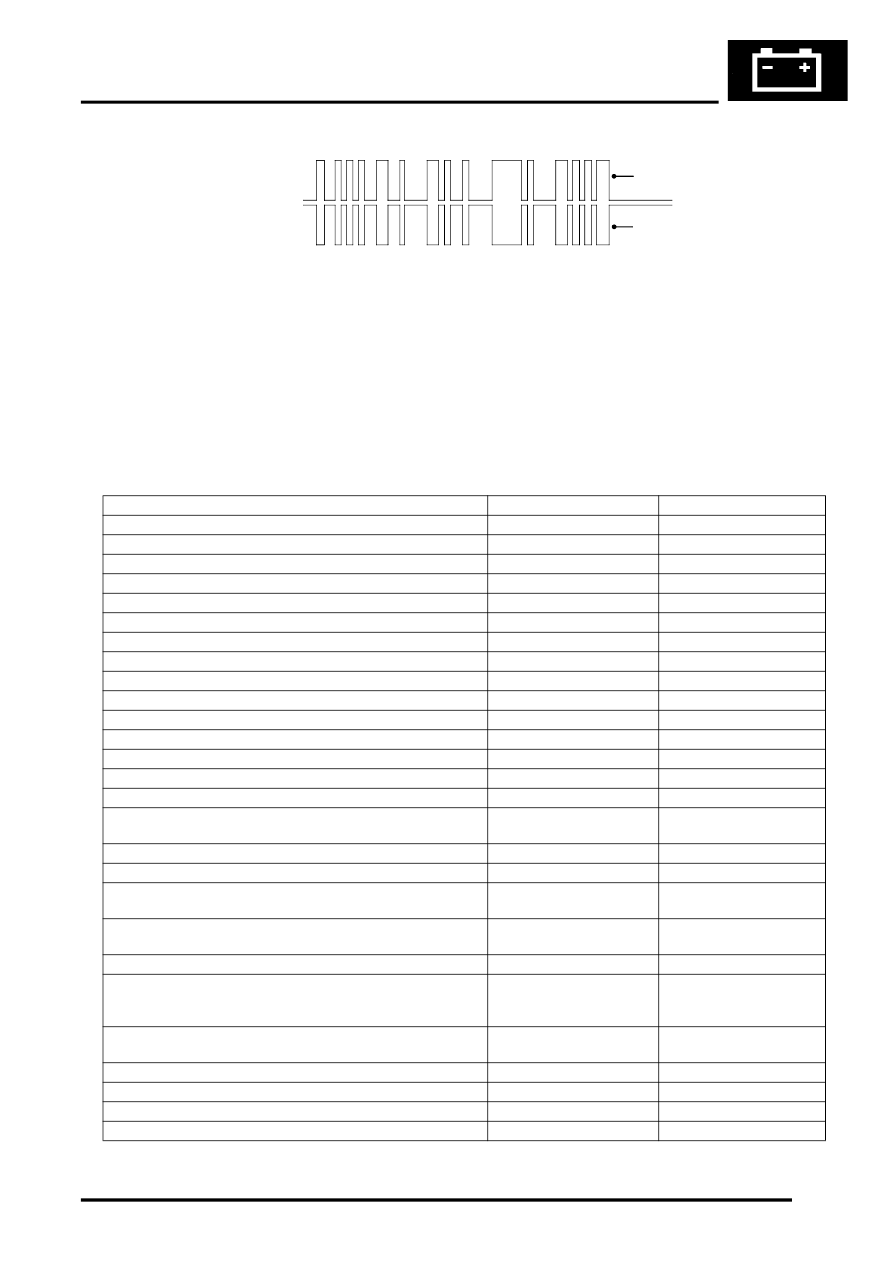
CAN Bus Switching
A = CAN H; B = CAN L
CAN Message Transmission
Messages transmitted via the CAN system are made up of eight data bytes and transmitted using a baud rate of 5,000
kbits per second. The twisted pair of wires used are coloured yellow and black (CAN_H) and yellow and brown
(CAN_L).
The following table lists the signals transmitted via the CAN system illustrating the system originating the message
and the message recipient:
CAN Message Transmission
Message
Source Destination
Brake pedal application status
ABS ECU
EAT ECU
Electronic brake distribution
ABS ECU
Instrument pack
ABS lamp status
ABS ECU
Instrument pack
Traction control lamp status
ABS ECU
Instrument pack
Brake intervention status
ABS ECU
EAT ECU
Vehicle speed error status
ABS ECU
ECM
Vehicle speed
ABS ECU
ECM, Instrument pack
Road surface status (roughness)
ABS ECU
ECM (petrol only)
Hill Descent Control (HDC) activity status
ABS ECU
EAT ECU, ECM
Hill Descent Control (HDC) fault status
ABS ECU
EAT ECU, ECM
Ignition switch status
ECM
ABS ECU, EAT ECU
Engine speed error status
ECM
ABS ECU, EAT ECU
Torque reduction status
ECM
EAT ECU
Torque measurement error status
ECM
ABS ECU, EAT ECU
Actual engine torque
ECM
ABS ECU, EAT ECU
Engine speed
ECM
ABS ECU, EAT ECU,
instrument pack
Maximum engine torque
ECM
ABS ECU, EAT ECU
Friction torque loss
ECM
ABS ECU, EAT ECU
Multiplexed information (CAN specification version, engine type
identifier, scaling factor for torque values)
ECM
ABS ECU, EAT ECU,
instrument pack
Coolant temperature
ECM
EAT ECU, instrument
pack
Driver demand/throttle angle
ECM
ABS ECU, EAT ECU
Cruise active
ECM
Cruise control interface
unit, EAT ECU,
instrument pack
Engine MIL status
ECM
EAT ECU, instrument
pack
Engine status (non emissions related faults)
ECM
Instrument pack
Fuel consumption
ECM
Instrument pack
Throttle pedal switch status
ECM
ABS ECU
Throttle pedal fault
ECM
ABS ECU
M86 5036
3.5v
3.5v
2.5v
1.5v
A
B