
LR3/Disco 3
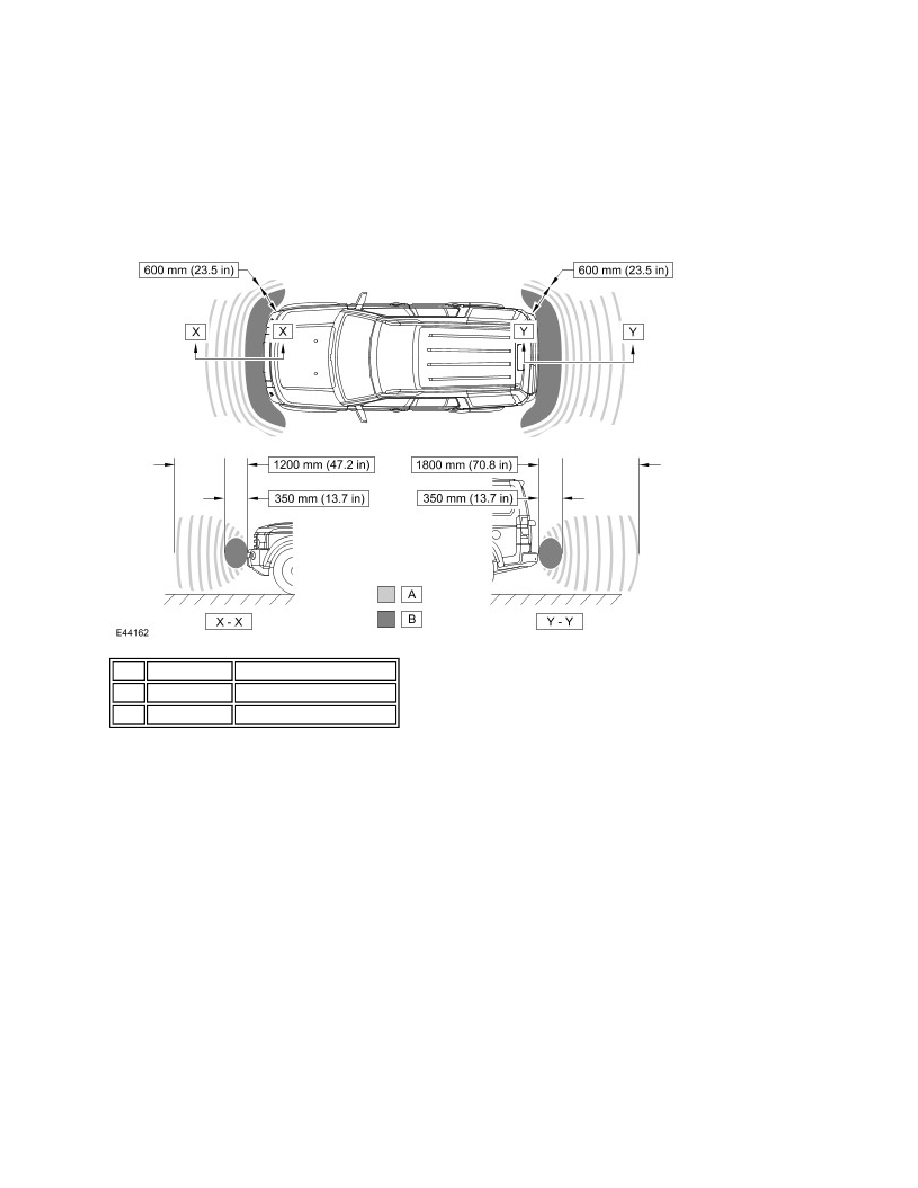
350 mm (13.7 in), the audible warning tone is continuous.
After the initial detection of an object, if there is no decrease in the distance between an object and the central sensors,
the time delay between the audible warnings remains constant. If an object is detected by one of the corner sensors only,
the audible warnings stop after about 5 seconds if there is no change in the distance between the object and the corner
sensor.
Detection Area
Detection Calculation
When operating in the combined transmitter and receiver mode, the sensor outputs a number ultrasonic pulses and
receives the reflected echo signal. The parking aid module amplifies the received echo signals and compares them with a
preprogrammed threshold to calculate the distance to the object. This is achieved by determining the elapsed time
between the transmission and reception of the ultrasonic signal.
When operating in receiver mode, the sensor receives echo signals transmitted by an adjacent sensor. This mode is used
to improve the accuracy of the system.
The detection cycle consists of the parking aid module operating one sensor in the combined transmitter and receiver
mode and transmitting a number of ultrasonic pulses. The module then switches the transmitting sensor and the adjacent
sensor(s) to receiver mode. After a short time delay, this sequence is repeated using a different sensor to transmit the
ultrasonic pulse and continues until all four sensors have output an ultrasonic signal. This sequence is completed in
100ms. The module uses several measurements of the same sensors to remove errors from the calculation.
If the object is directly behind a sensor, the distance is calculated using the time between the transmission and reception
of the signal. If the object is positioned between two sensors, the parking aid module uses both signals to determine the
correct distance using triangulation.
To perform the triangulation calculation, the parking aid module must know the distance between the individual sensors in
the bumper. This information is stored in the module memory. From the received distance from each sensor and using the
Item Part Number
Description
A
-
Intermittent Warning Tone
B
-
Continuous Warning Tone