
Mariner 2WD L4-2.3L VIN H Hybrid (2006)
Throttle Plate Position Controller (TPPC) Outputs
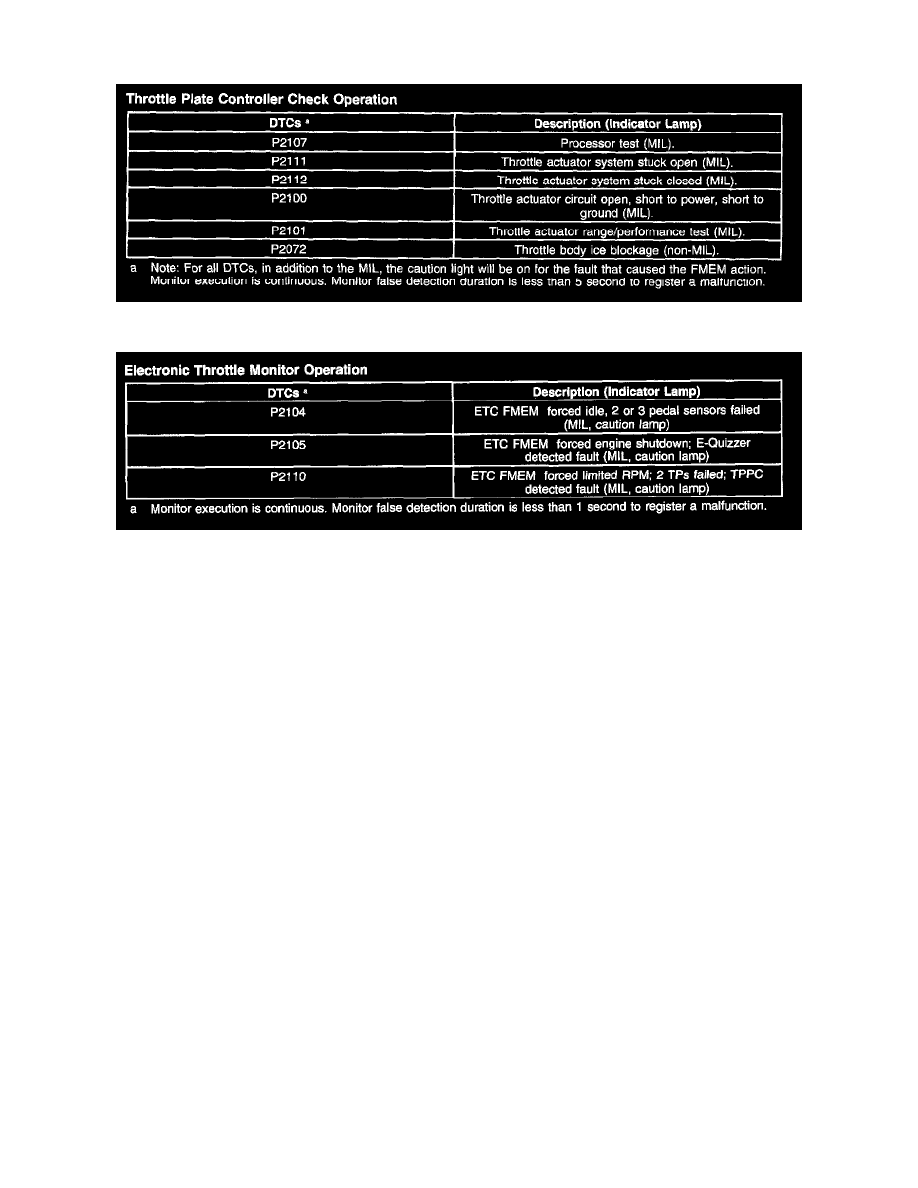
Throttle Plate Controller Check Operation
Electronic Throttle Monitor Operation
The purpose of the TPPC is to control the throttle position to the desired throttle angle. It is a separate chip embedded in the PCM. The desired angle
is communicated from the main CPU over a 312.5 Hz duty cycle signal. The TPPC interprets the duty cycle signal as follows:
-
Less than 5% - Out of range, limp home default position.
-
Greater than or equal to 5% but less than 6% - Commanded default position, closed.
-
Greater than or equal to 6% but less than 7% - Commanded default position. Used for key on, engine off.
-
Greater than or equal to 7% but less than 10% - Closed against hard-stop. Used to learn zero throttle angle position (hard-stop) after key-up.
-
Greater than or equal to 10% but less than or equal to 92% - Normal operation, between 0 degrees (hard-stop) and 82 degrees, 10% duty cycle
equals 0 degrees throttle angle, 92% duty cycle equals 82 degrees throttle angle.
-
Greater than 92% but less than or equal to 96% - Wide Open Throttle, 82 to 86 degrees throttle angle.
-
Greater than 96% but less than or equal to 100% - Out of Range, limp home default position.
The desired angle is relative to the hard-stop angle. The hard-stop angle is learned during each key-up process before the main CPU requests the
throttle plate to be closed against the hard-stop. The output of the TPPC is a voltage request to the H-driver (also in PCM). The H-driver is capable of
providing a positive or negative voltage to the electronic throttle body motor.