
V50 L5-2.4L VIN 39 B5244S7 (2005)
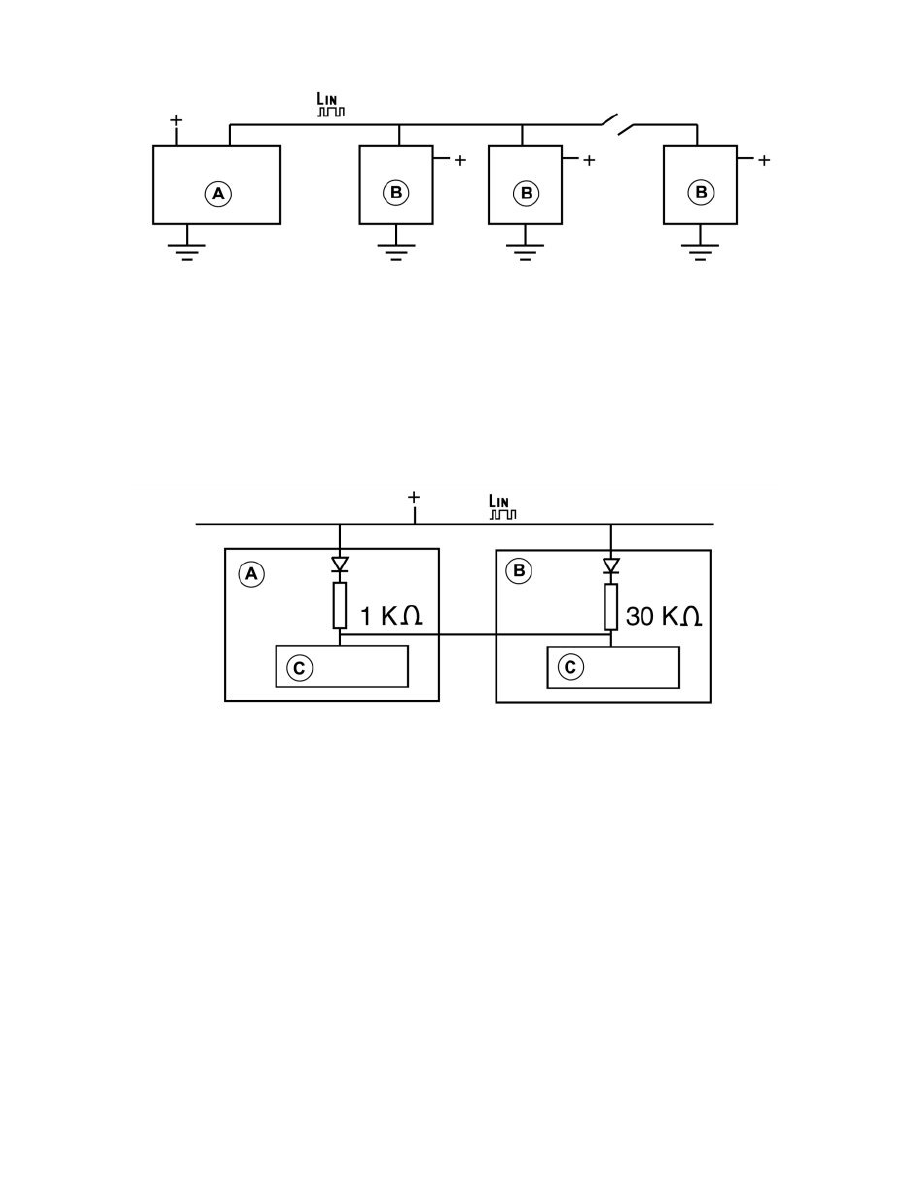
A = Master node
B = Slave node
The network is made up of a number of control modules connected to each other via a communications wire. The control modules are voltage fed and
ground individually and exchange information in an optional direction via the communication wiring.
In event of a failure on the communication wiring, the control modules will not be able to communicate with the other control modules located after the
failure. However, the control modules located before the failure can still communicate.
On a LIN bus there is always one control module that is the main control module (a.k.a. master node). All other control modules on the same LIN bus are
slave nodes.
Terminating resistor
A = Master node
B = Slave node
C = Transmitter/receiver
LIN is terminated to the battery voltage on each node via a pull-up resistance
The master node is terminated with 1 kohms and the slave nodes with 30 kohms.
The termination resistance forms a parallel circuit and the resistance to the battery voltage depends on the number of connected nodes. The resistance to
ground should be infinite or at least extremely large if no communications are in progress.
LIN (Local Interconnect Network)
LIN (Local Interconnect Network)
General
LIN (Local Interconnect Network) is a standardized protocol for serial communication on a single wire between a master and several slave nodes.
The LIN protocol supports Multiplex communication, which means several nodes can communicate on the same wire without disturbing each other.
LIN was developed, by a consortium of automotive manufacturers, at the end of the 90s in order to build a network for data exchange over short
distances at a low cost. The development of the LIN standard is ongoing and Volvo plays an active part in this work.
LIN is adapted for one master and up to 16 slave nodes on each communication bus.
More nodes are possible, but several communication buses can in these instances be connected together via the master node. The master node can also
make up an interface to other types of communication buses, for example, CAN or MOST.
LIN is bidirectional, (two way half duplex) which means information can be sent in both directions. However only one control module at a time can send