
XC90 2.5T AWD L5-2.5L Turbo VIN 59 B5254T2 (2003)
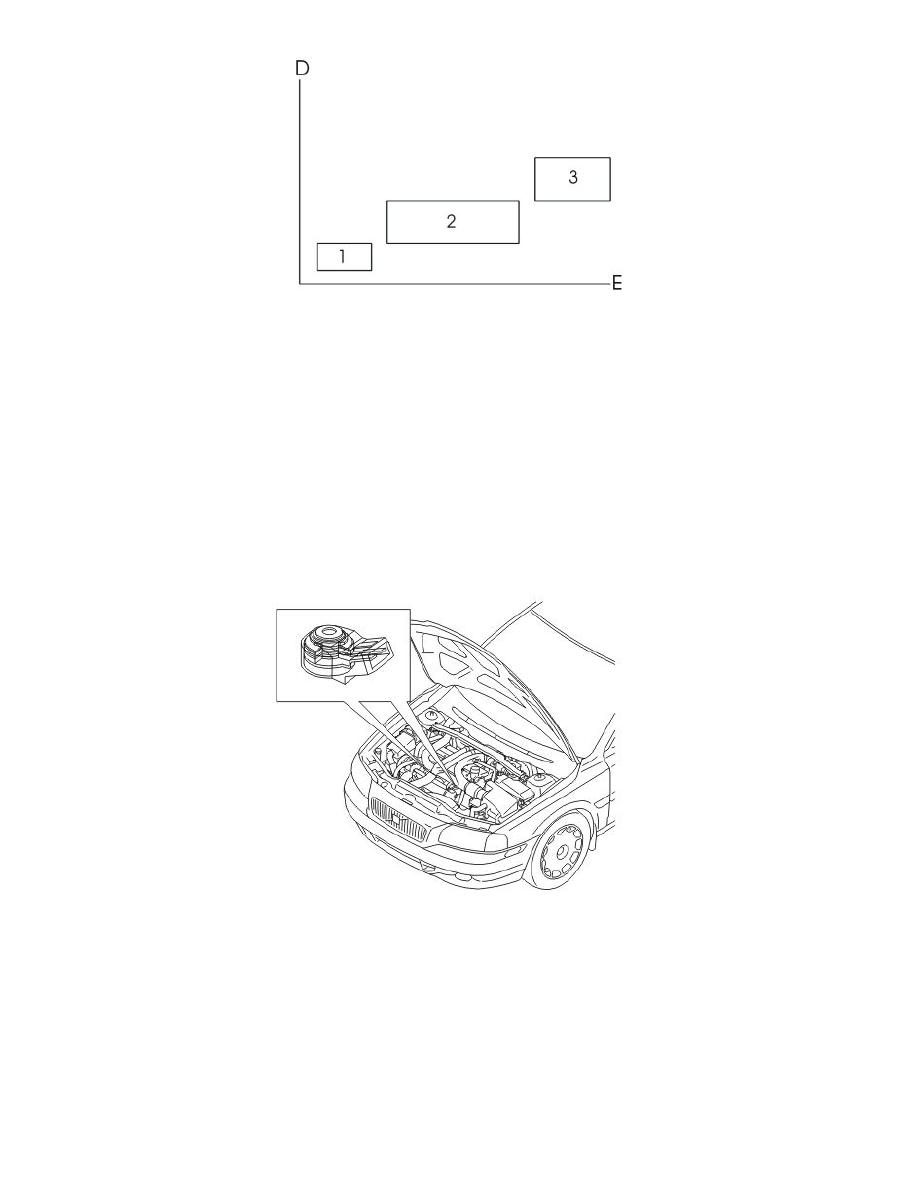
The adaptive functions consist of three sections and correspond to the different operating ranges of the engine; load (D) and engine speed (E):
-
Additive adaptation (1) is when the engine is idling. This is how the control module adjusts the CO content at idle speed. Long-term fuel trim,
idling can be read off using VIDA
-
Multiplicative adaptation, lower part load (2), carried out in the lower part load range. Lower part load range is reached when driving at low load.
Long-term fuel trim, lower part load can be read off using VIDA
-
Multiplicative adaptation, upper part load (3). Carried out in the upper part load range. The upper part load range is reached when driving under
high load and at high engine speed (rpm). Long-term fuel trim, upper part load can be read off using VIDA.
The adaptive adjustments of the injection period are stored continuously in the control module. This means that under different operating conditions the
fuel air mixture is obtained before the heated oxygen sensor (HO2S) is warm enough to function.
A diagnostic trouble code (DTC) will be stored in the control module if any adaptation value is too high or too low. For further information, also see
Heated oxygen sensor (HO2S) diagnostic See: Description and Operation/Heated Oxygen Sensor (HO2S) Diagnostic.
Knock control
Knocking occurs in the combustion chamber when the fuel and air mixture self ignites. This can occur either before or after the spark plug has produced
an ignition spark. In both cases the gas in two or more places ignites in the combustion chamber.
This results in an extremely fast combustion process with flames from several directions. When these flames collide, the pressure in the cylinder
increases rapidly and there is a mechanical knocking sound.
If any of the cylinders knock there is a specific type of vibration in the cylinder block. These vibrations are transferred to the knock sensors (KS) which
are screwed into place in the cylinder block. The resultant mechanical stress in the piezo electrical material in the knock sensors generates a voltage. The
engine control module (ECM) can then determine which cylinder is knocking with the help of the camshaft position (CMP) sensor and the engine speed
(RPM) sensor.
The knock sensors (KS) also interpret a proportion of normal engine sound. The control module is able to recognize the vibrations which correspond to
knocking by filtering, amplifying and using software to evaluate the signal.
If the knock sensors (KS) detect knocking in the engine over a certain threshold value, the ignition timing is first retarded and then the fuel/air mixture is
enriched to eliminate knocking.