
XC90 AWD L5-2.5L Turbo VIN 59 B5254T2 (2005)
Information Bus: Description and Operation
The Controller Area Network (CAN)
CAN Network
CAN-network (Controller Area Network)
General
CAN (Controller Area Network) is a standardized system for multiplex communication. Multiplex communication means that you can transmit messages
between one or more control modules on the same wires without communication between the various control modules disrupting one another. Volvo has
produced a new standard for multiplex communication, known as VOLCANO. VOLCANO is a further development of CAN and works with real-time
processing, as well as prioritization. The description of prioritization is based on VOLCANO but named CAN.
The standard for Control area network (CAN) specifies:
-
That two cables should be used (CAN H and CAN L)
-
Which voltage levels should be used
-
What a message should look like
-
How transfer errors should be handled.
Cables, CAN H and CAN L
The wires CAN H and CAN L must not be confused with HS CAN and LS CAN, which indicate the speed of the CAN network. CAN H and CAN L are
the names for the wires used to distribute the signals in the multiplex communications network.
Communication takes place using two wires. These two wires are twisted together and are made of a copper material.
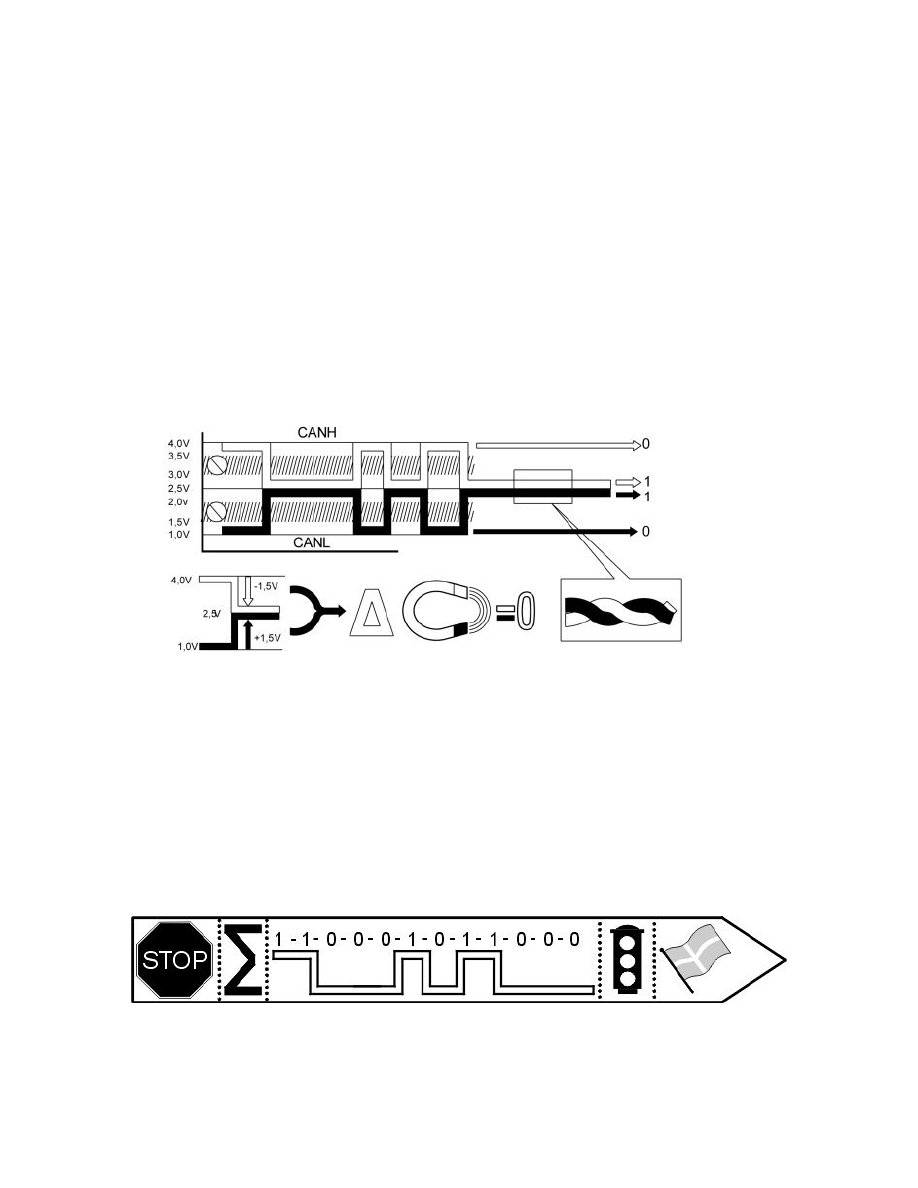
The voltage levels for communication take place using differential voltage levels. Two twisted-pair wires and differential voltage levels are used because
this makes the network less susceptible to interference.
The same message is transferred simultaneously by both cables, but different voltage levels are used.
-
Binary 1 = 2.5 V on both CAN H and CAN L.
-
Binary 0 = 4 V on CAN H and 1 V on CAN L.
When measured between CAN L and earth, the average voltage level is approx. 2.3 V.
When measured between CAN H and earth, the average voltage level is approx. 2.8 V. When measured between the two CAN wires, with normal traffic
on the network, the average voltage level is approx. 0.5 V.
Controller area network (CAN) message
The message consists of the following components:
-
Identifier ("flag"), which indicates the message's identity and priority.
-
Data information (value, information etc.)
-
Check sum, used to check that the message has arrived correctly
-
Stop signal, which indicates that the message has finished.
A complete Controller area message is called a frame.