
LR3/Disco 3
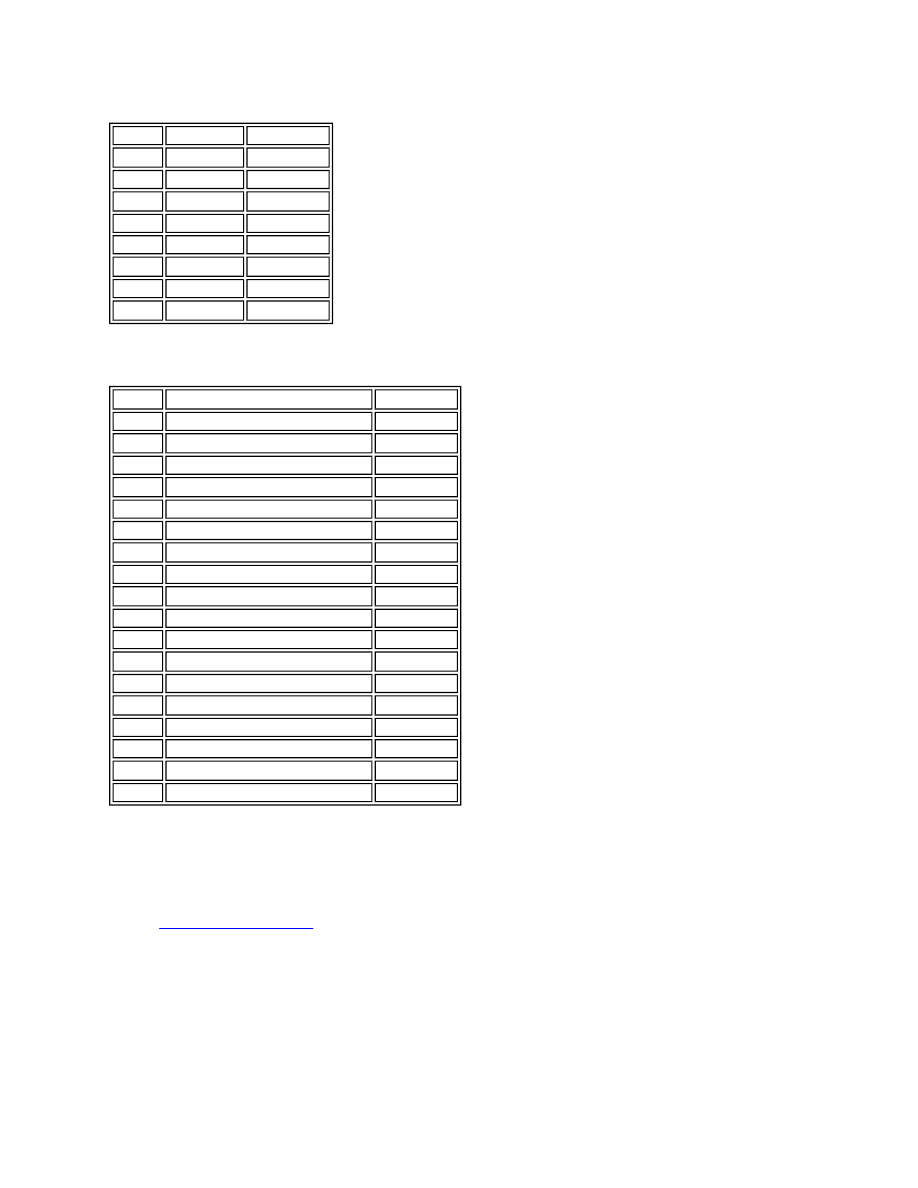
Connector C2163
Connector C2164
CAN Bus Messages
The CAN bus is a high speed broadcast network connected between various vehicle control modules. It allows the fast
exchange of data between control modules every few microseconds. The bus comprises two wires, which are twisted
together to minimise electromagnetic interference (noise) produced by the CAN messages. For additional information,
refer to
Communications Network
(418 -00 Module Communications Network)
The electronic rear differential control module is connected on the CAN bus, via the transfer box control module, and
controls differential operation using CAN messages from other control units on the network. Wheel speed, steering angle,
automatic transmission speed, temperature information, car configuration, axle ratios and mode inputs, are some of the
main signals received by the control module.
The control module also sends messages via the CAN bus to tell other control modules on the network, the status of the
electronic rear differential. The clutch torque and default mode status are some of the main signals sent out by the control
module.
Pin No. Description Input/output
1
Not used
-
2
Not used
-
3
Ground
-
4
Ignition feed
Input
5
Not used
-
6
Ground
-
7
Battery feed
Input
8
Battery feed
Input
Pin No.
Description
Input/output
1
+ve for actuator Hall sensor
Input
2
Not used
-
3
Actuator motor
Output
4
Hall sensor - Signal A
Input
5
Not used
-
6
Not used
-
7
Hall sensor - Signal B
Input
8
Differential oil temperature sensor
Input
9
Not used
-
10
Ground - Hall sensor
-
11
Differential oil temperature sensor
Output
12
Actuator motor
Input
13
Motor temperature sensor
Output
14
Not used
-
15
Not used
-
16
Motor temperature sensor
Input
17
Motor brake solenoid
Output
18
Motor brake solenoid
Input